The nonlinear solid with contact solver class. More...
#include <solid_mechanics_contact.hpp>
Public Member Functions | |
| SolidMechanicsContact (const NonlinearSolverOptions nonlinear_opts, const LinearSolverOptions lin_opts, const serac::TimesteppingOptions timestepping_opts, const GeometricNonlinearities geom_nonlin, const std::string &physics_name, std::string mesh_tag, std::vector< std::string > parameter_names={}, int cycle=0, double time=0.0) | |
| Construct a new SolidMechanicsContact object. More... | |
| SolidMechanicsContact (std::unique_ptr< serac::EquationSolver > solver, const serac::TimesteppingOptions timestepping_opts, const GeometricNonlinearities geom_nonlin, const std::string &physics_name, std::string mesh_tag, std::vector< std::string > parameter_names={}, int cycle=0, double time=0.0) | |
| Construct a new SolidMechanicsContact object. More... | |
| SolidMechanicsContact (const SolidMechanicsInputOptions &input_options, const std::string &physics_name, std::string mesh_tag, int cycle=0, double time=0.0) | |
| Construct a new Nonlinear SolidMechanicsContact Solver object. More... | |
| std::unique_ptr< mfem_ext::StdFunctionOperator > | buildQuasistaticOperator () override |
| Build the quasi-static operator corresponding to the total Lagrangian formulation. | |
| void | addContactInteraction (int interaction_id, const std::set< int > &bdry_attr_surf1, const std::set< int > &bdry_attr_surf2, ContactOptions contact_opts) |
| Add a mortar contact boundary condition. More... | |
| void | completeSetup () override |
| Complete the initialization and allocation of the data structures. More... | |
| void | quasiStaticSolve (double dt) override |
| Solve the Quasi-static Newton system. | |
 Public Member Functions inherited from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > > Public Member Functions inherited from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > > | |
| SolidMechanics (const NonlinearSolverOptions nonlinear_opts, const LinearSolverOptions lin_opts, const serac::TimesteppingOptions timestepping_opts, const GeometricNonlinearities geom_nonlin, const std::string &physics_name, std::string mesh_tag, std::vector< std::string > parameter_names={}, int cycle=0, double time=0.0, bool checkpoint_to_disk=false) | |
| Construct a new SolidMechanics object. More... | |
| SolidMechanics (std::unique_ptr< serac::EquationSolver > solver, const serac::TimesteppingOptions timestepping_opts, const GeometricNonlinearities geom_nonlin, const std::string &physics_name, std::string mesh_tag, std::vector< std::string > parameter_names={}, int cycle=0, double time=0.0, bool checkpoint_to_disk=false) | |
| Construct a new SolidMechanics object. More... | |
| SolidMechanics (const SolidMechanicsInputOptions &input_options, const std::string &physics_name, std::string mesh_tag, int cycle=0, double time=0.0) | |
| Construct a new Nonlinear SolidMechanics Solver object. More... | |
| virtual | ~SolidMechanics () |
| Destroy the SolidMechanics Functional object. | |
| void | initializeSolidMechanicsStates () |
| Non virtual method to reset thermal states to zero. This does not reset design parameters or shape. More... | |
| void | resetStates (int cycle=0, double time=0.0) override |
| Method to reset physics states to zero. This does not reset design parameters or shape. More... | |
| template<typename T > | |
| qdata_type< T > | createQuadratureDataBuffer (T initial_state) |
| Create a shared ptr to a quadrature data buffer for the given material type. More... | |
| void | setDisplacementBCs (const std::set< int > &disp_bdr, std::function< void(const mfem::Vector &, mfem::Vector &)> disp) |
| Set essential displacement boundary conditions (strongly enforced) More... | |
| void | setDisplacementBCs (const std::set< int > &disp_bdr, std::function< void(const mfem::Vector &, double, mfem::Vector &)> disp) |
| Set essential displacement boundary conditions (strongly enforced) More... | |
| void | setDisplacementBCs (const std::set< int > &disp_bdr, std::function< double(const mfem::Vector &x)> disp, int component) |
| Set the displacement essential boundary conditions on a single component. More... | |
| void | setDisplacementBCsByDofList (const mfem::Array< int > true_dofs, std::function< void(const mfem::Vector &, double, mfem::Vector &)> disp) |
| Set the displacement essential boundary conditions on a set of true degrees of freedom. More... | |
| void | setDisplacementBCsByDofList (const mfem::Array< int > true_dofs, std::function< void(const mfem::Vector &, mfem::Vector &)> disp) |
| Set the displacement essential boundary conditions on a set of true degrees of freedom. More... | |
| void | setDisplacementBCs (std::function< bool(const mfem::Vector &)> is_node_constrained, std::function< void(const mfem::Vector &, double, mfem::Vector &)> disp) |
| Set the displacement boundary conditions on a set of nodes within a spatially-defined area. More... | |
| void | setDisplacementBCs (std::function< bool(const mfem::Vector &)> is_node_constrained, std::function< void(const mfem::Vector &, mfem::Vector &)> disp) |
| Set the displacement boundary conditions on a set of nodes within a spatially-defined area. More... | |
| void | setDisplacementBCs (std::function< bool(const mfem::Vector &)> is_node_constrained, std::function< double(const mfem::Vector &, double)> disp, int component) |
| Set the displacement boundary conditions on a set of nodes within a spatially-defined area for a single displacement vector component. More... | |
| void | setDisplacementBCs (std::function< bool(const mfem::Vector &x)> is_node_constrained, std::function< double(const mfem::Vector &x)> disp, int component) |
| Set the displacement boundary conditions on a set of nodes within a spatially-defined area for a single displacement vector component. More... | |
| const FiniteElementState & | state (const std::string &state_name) const override |
| Accessor for getting named finite element state fields from the physics modules. More... | |
| void | setState (const std::string &state_name, const FiniteElementState &state) override |
| Set the primal solution field (displacement, velocity) for the underlying solid mechanics solver. More... | |
| std::vector< std::string > | stateNames () const override |
| Get a vector of the finite element state solution variable names. More... | |
| template<int... active_parameters, typename callable > | |
| void | addCustomBoundaryIntegral (DependsOn< active_parameters... >, callable qfunction, const std::optional< Domain > &optional_domain=std::nullopt) |
| register a custom boundary integral calculation as part of the residual More... | |
| const FiniteElementState & | adjoint (const std::string &state_name) const override |
| Accessor for getting named finite element state adjoint solution from the physics modules. More... | |
| std::vector< std::string > | adjointNames () const override |
| Get a vector of the finite element state solution variable names. More... | |
| template<int... active_parameters, typename callable , typename StateType = Nothing> | |
| void | addCustomDomainIntegral (DependsOn< active_parameters... >, callable qfunction, qdata_type< StateType > qdata=NoQData) |
| register a custom domain integral calculation as part of the residual More... | |
| template<int... active_parameters, typename MaterialType , typename StateType = Empty> | |
| void | setMaterial (DependsOn< active_parameters... >, MaterialType material, qdata_type< StateType > qdata=EmptyQData) |
| Set the material stress response and mass properties for the physics module. More... | |
| template<typename MaterialType , typename StateType = Empty> | |
| void | setMaterial (MaterialType material, std::shared_ptr< QuadratureData< StateType >> qdata=EmptyQData) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| void | setDisplacement (std::function< void(const mfem::Vector &x, mfem::Vector &disp)> disp) |
| Set the underlying finite element state to a prescribed displacement. More... | |
| void | setDisplacement (const FiniteElementState &temp) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| void | setVelocity (std::function< void(const mfem::Vector &x, mfem::Vector &vel)> vel) |
| Set the underlying finite element state to a prescribed velocity. More... | |
| void | setVelocity (const FiniteElementState &temp) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| template<int... active_parameters, typename BodyForceType > | |
| void | addBodyForce (DependsOn< active_parameters... >, BodyForceType body_force, const std::optional< Domain > &optional_domain=std::nullopt) |
| Set the body forcefunction. More... | |
| template<typename BodyForceType > | |
| void | addBodyForce (BodyForceType body_force, const std::optional< Domain > &optional_domain=std::nullopt) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| template<int... active_parameters, typename TractionType > | |
| void | setTraction (DependsOn< active_parameters... >, TractionType traction_function, const std::optional< Domain > &optional_domain=std::nullopt) |
| Set the traction boundary condition. More... | |
| template<typename TractionType > | |
| void | setTraction (TractionType traction_function, const std::optional< Domain > &optional_domain=std::nullopt) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| template<int... active_parameters, typename PressureType > | |
| void | setPressure (DependsOn< active_parameters... >, PressureType pressure_function, const std::optional< Domain > &optional_domain=std::nullopt) |
| Set the pressure boundary condition. More... | |
| template<typename PressureType > | |
| void | setPressure (PressureType pressure_function, const std::optional< Domain > &optional_domain=std::nullopt) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| std::pair< const mfem::HypreParMatrix &, const mfem::HypreParMatrix & > | stiffnessMatrix () const |
| Return the assembled stiffness matrix. More... | |
| void | zeroEssentials (FiniteElementVector &field) const |
| Set field to zero wherever their are essential boundary conditions applies. | |
| void | advanceTimestep (double dt) override |
| Advance the solid mechanics physics module in time. More... | |
| virtual void | setAdjointLoad (std::unordered_map< std::string, const serac::FiniteElementDual & > loads) override |
| Set the loads for the adjoint reverse timestep solve. More... | |
| void | reverseAdjointTimestep () override |
| Solve the adjoint problem. More... | |
| std::unordered_map< std::string, FiniteElementState > | getCheckpointedStates (int cycle_to_load) const override |
| Accessor for getting named finite element state primal solution from the physics modules at a given checkpointed cycle index. More... | |
| FiniteElementDual & | computeTimestepSensitivity (size_t parameter_field) override |
| Compute the implicit sensitivity of the quantity of interest used in defining the load for the adjoint problem with respect to the parameter field. More... | |
| FiniteElementDual & | computeTimestepShapeSensitivity () override |
| Compute the implicit sensitivity of the quantity of interest used in defining the load for the adjoint problem with respect to the shape displacement field. More... | |
| const std::unordered_map< std::string, const serac::FiniteElementDual & > | computeInitialConditionSensitivity () override |
| Compute the implicit sensitivity of the quantity of interest with respect to the initial temperature. More... | |
| const serac::FiniteElementState & | displacement () const |
| Get the displacement state. More... | |
| const serac::FiniteElementState & | velocity () const |
| Get the velocity state. More... | |
| const serac::FiniteElementState & | acceleration () const |
| Get the acceleration state. More... | |
| const serac::FiniteElementDual & | reactions () |
| getter for nodal forces (before zeroing-out essential dofs) | |
| Public Member Functions inherited from serac::BasePhysics | |
| BasePhysics (std::string physics_name, std::string mesh_tag, int cycle=0, double time=0.0, bool checkpoint_to_disk=false) | |
| Empty constructor. More... | |
| BasePhysics (BasePhysics &&other)=default | |
| Construct a new Base Physics object (copy constructor) More... | |
| virtual double | time () const |
| Get the current forward-solution time. More... | |
| virtual int | cycle () const |
| Get the current forward-solution cycle iteration number. More... | |
| virtual double | maxTime () const |
| Get the maximum time reached by the forward solver. More... | |
| virtual double | minTime () const |
| Get the initial time used by the forward solver. More... | |
| virtual int | maxCycle () const |
| The maximum cycle (timestep iteration number) reached by the forward solver. More... | |
| virtual int | minCycle () const |
| Get the initial cycle (timestep iteration number) used by the forward solver. More... | |
| bool | isQuasistatic () const |
| Check if the physics is setup as quasistatic. More... | |
| virtual std::vector< double > | timesteps () const |
| Get a vector of the timestep sizes (i.e. \(\Delta t\)s) taken by the forward solver. More... | |
| const FiniteElementState & | shapeDisplacement () const |
| Accessor for getting the shape displacement field from the physics modules. More... | |
| const FiniteElementState & | parameter (const std::string ¶meter_name) const |
| Accessor for getting named finite element state parameter fields from the physics modules. More... | |
| const FiniteElementState & | parameter (std::size_t parameter_index) const |
| Accessor for getting indexed finite element state parameter fields from the physics modules. More... | |
| std::vector< std::string > | parameterNames () |
| Get a vector of the finite element state parameter names. More... | |
| void | setParameter (const size_t parameter_index, const FiniteElementState ¶meter_state) |
| Deep copy a parameter field into the internally-owned parameter used for simulations. More... | |
| void | setShapeDisplacement (const FiniteElementState &shape_displacement) |
| Set the current shape displacement for the underlying mesh. More... | |
| virtual void | outputStateToDisk (std::optional< std::string > paraview_output_dir={}) const |
Output the current state of the PDE fields in Sidre format and optionally in Paraview format if paraview_output_dir is given. More... | |
| FiniteElementState | loadCheckpointedState (const std::string &state_name, int cycle) const |
| Accessor for getting a single named finite element state primal solution from the physics modules at a given checkpointed cycle index. More... | |
| virtual double | getCheckpointedTimestep (int cycle) const |
| Get a timestep increment which has been previously checkpointed at the give cycle. More... | |
| virtual void | initializeSummary (axom::sidre::DataStore &datastore, const double t_final, const double dt) const |
| Initializes the Sidre structure for simulation summary data. More... | |
| virtual void | saveSummary (axom::sidre::DataStore &datastore, const double t) const |
| Saves the summary data to the Sidre Datastore. More... | |
| virtual | ~BasePhysics ()=default |
| Destroy the Base Solver object. | |
| const mfem::ParMesh & | mesh () const |
| Returns a reference to the mesh object. | |
| mfem::ParMesh & | mesh () |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
Protected Member Functions | |
| void | warmStartDisplacement () |
| Sets the Dirichlet BCs for the current time and computes an initial guess for parameters and displacement. | |
| Protected Member Functions inherited from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > > | |
| mfem::Array< int > | calculateConstrainedDofs (std::function< bool(const mfem::Vector &)> is_node_constrained, std::optional< int > component={}) |
| Calculate a list of constrained dofs in the true displacement vector from a function that returns true if a physical coordinate is in the constrained set. More... | |
| void | warmStartDisplacement () |
| Sets the Dirichlet BCs for the current time and computes an initial guess for parameters and displacement. | |
| Protected Member Functions inherited from serac::BasePhysics | |
| void | CreateParaviewDataCollection () const |
| Create a paraview data collection for the physics package if requested. | |
| void | UpdateParaviewDataCollection (const std::string ¶view_output_dir) const |
| Update the paraview states, duals, parameters, and metadata (cycle, time) in preparation for output. More... | |
| void | initializeBasePhysicsStates (int cycle, double time) |
| Protected, non-virtual method to reset physics states to zero. This does not reset design parameters or shape. More... | |
Protected Attributes | |
| mfem::Operator * | J_operator_ |
| Pointer to the Jacobian operator (J_ if no Lagrange multiplier contact, J_constraint_ otherwise) | |
| std::unique_ptr< mfem::HypreParMatrix > | J_21_ |
| 21 Jacobian block if using Lagrange multiplier contact (dg/dx) | |
| std::unique_ptr< mfem::HypreParMatrix > | J_12_ |
| 12 Jacobian block if using Lagrange multiplier contact (df/dp) | |
| std::unique_ptr< mfem::HypreParMatrix > | J_22_ |
| 22 Jacobian block if using Lagrange multiplier contact (ones on diagonal for inactive t-dofs) | |
| mfem::Array< int > | J_offsets_ |
| Block offsets for the J_constraint_ BlockOperator (must be owned outside J_constraint_) | |
| std::unique_ptr< mfem::BlockOperator > | J_constraint_ |
| Assembled sparse matrix for the Jacobian with constraint blocks. | |
| std::unique_ptr< mfem::HypreParMatrix > | J_e_21_ |
| Columns of J_21_ that have been separated out because they are associated with essential boundary conditions. | |
| std::unique_ptr< mfem::BlockOperator > | J_constraint_e_ |
| ContactData | contact_ |
| Class holding contact constraint data. | |
| BoundaryConditionManager | bcs_ |
| Boundary condition manager instance. | |
| int | cycle_ |
| Current cycle (forward pass time iteration count) | |
| bool | is_quasistatic_ |
| Whether the simulation is time-independent. | |
| mfem::ParMesh & | mesh_ |
| The primary mesh. | |
| std::vector< ParameterInfo > | parameters_ |
| A vector of the parameters associated with this physics module. | |
| FiniteElementState & | shape_displacement_ |
| The parameter info associated with the shape displacement field. More... | |
| double | time_ |
| Current time for the forward pass. | |
| FiniteElementState | acceleration_ |
| The acceleration finite element state. | |
| std::array< std::function< decltype((*residual_)(DifferentiateWRT< 1 >{}, 0.0, shape_displacement_, displacement_, acceleration_, *parameters_[parameter_indices].state...))(double)>, sizeof...(parameter_indices)> | d_residual_d_ |
| Array functions computing the derivative of the residual with respect to each given parameter. More... | |
| FiniteElementState | displacement_ |
| The displacement finite element state. | |
| mfem::Vector | dr_ |
| vector used to store forces arising from du_ when applying time-dependent bcs | |
| mfem::Vector | du_ |
| vector used to store the change in essential bcs between timesteps | |
| std::unique_ptr< mfem::HypreParMatrix > | J_ |
| Assembled sparse matrix for the Jacobian df/du (11 block if using Lagrange multiplier contact) | |
| std::unique_ptr< mfem::HypreParMatrix > | J_e_ |
| std::unique_ptr< EquationSolver > | nonlin_solver_ |
| the specific methods and tolerances specified to solve the nonlinear residual equations | |
| std::unique_ptr< ShapeAwareFunctional< shape_trial, test(trial, trial, parameter_space...)> > | residual_ |
| serac::Functional that is used to calculate the residual and its derivatives | |
| std::unique_ptr< mfem_ext::StdFunctionOperator > | residual_with_bcs_ |
| mfem::Operator that calculates the residual after applying essential boundary conditions | |
| Protected Attributes inherited from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > > | |
| FiniteElementState | displacement_ |
| The displacement finite element state. | |
| FiniteElementState | velocity_ |
| The velocity finite element state. | |
| FiniteElementState | acceleration_ |
| The acceleration finite element state. | |
| FiniteElementState | adjoint_displacement_ |
| The displacement finite element adjoint state. | |
| FiniteElementDual | displacement_adjoint_load_ |
| The adjoint load (RHS) for the displacement adjoint system solve (downstream -dQOI/d displacement) | |
| FiniteElementDual | velocity_adjoint_load_ |
| The adjoint load (RHS) for the velocity adjoint system solve (downstream -dQOI/d velocity) | |
| FiniteElementDual | acceleration_adjoint_load_ |
| The adjoint load (RHS) for the adjoint system solve (downstream -dQOI/d acceleration) | |
| FiniteElementDual | implicit_sensitivity_displacement_start_of_step_ |
| The total/implicit sensitivity of the qoi with respect to the start of the previous timestep's displacement. | |
| FiniteElementDual | implicit_sensitivity_velocity_start_of_step_ |
| The total/implicit sensitivity of the qoi with respect to the start of the previous timestep's velocity. | |
| FiniteElementDual | reactions_ |
| nodal forces | |
| std::unique_ptr< ShapeAwareFunctional< shape_trial, test(trial, trial, parameter_space...)> > | residual_ |
| serac::Functional that is used to calculate the residual and its derivatives | |
| std::unique_ptr< mfem_ext::StdFunctionOperator > | residual_with_bcs_ |
| mfem::Operator that calculates the residual after applying essential boundary conditions | |
| std::unique_ptr< EquationSolver > | nonlin_solver_ |
| the specific methods and tolerances specified to solve the nonlinear residual equations | |
| mfem_ext::SecondOrderODE | ode2_ |
| the ordinary differential equation that describes how to solve for the second time derivative of displacement, given the current displacement, velocity, and source terms | |
| std::unique_ptr< mfem::HypreParMatrix > | J_ |
| Assembled sparse matrix for the Jacobian df/du (11 block if using Lagrange multiplier contact) | |
| std::unique_ptr< mfem::HypreParMatrix > | J_e_ |
| mfem::Vector | predicted_displacement_ |
| an intermediate variable used to store the predicted end-step displacement | |
| mfem::Vector | du_ |
| vector used to store the change in essential bcs between timesteps | |
| mfem::Vector | dr_ |
| vector used to store forces arising from du_ when applying time-dependent bcs | |
| mfem::Vector | u_ |
| used to communicate the ODE solver's predicted displacement to the residual operator | |
| mfem::Vector | v_ |
| used to communicate the ODE solver's predicted velocity to the residual operator | |
| double | c0_ |
| coefficient used to calculate predicted displacement: u_p := u + c0 * d2u_dt2 | |
| double | c1_ |
| coefficient used to calculate predicted velocity: dudt_p := dudt + c1 * d2u_dt2 | |
| GeometricNonlinearities | geom_nonlin_ |
| A flag denoting whether to compute geometric nonlinearities in the residual. | |
| std::shared_ptr< mfem::VectorCoefficient > | disp_bdr_coef_ |
| Coefficient containing the essential boundary values. | |
| std::shared_ptr< mfem::Coefficient > | component_disp_bdr_coef_ |
| Coefficient containing the essential boundary values. | |
| std::array< std::function< decltype((*residual_)(DifferentiateWRT< 1 >{}, 0.0, shape_displacement_, displacement_, acceleration_, *parameters_[parameter_indices].state...))(double)>, sizeof...(parameter_indices)> | d_residual_d_ |
| Array functions computing the derivative of the residual with respect to each given parameter. More... | |
| Protected Attributes inherited from serac::BasePhysics | |
| std::string | name_ = {} |
| Name of the physics module. | |
| std::string | mesh_tag_ = {} |
| ID of the corresponding MFEMSidreDataCollection (denoting a mesh) | |
| mfem::ParMesh & | mesh_ |
| The primary mesh. | |
| MPI_Comm | comm_ |
| The MPI communicator. | |
| std::vector< const serac::FiniteElementState * > | states_ |
| List of finite element primal states associated with this physics module. | |
| std::vector< const serac::FiniteElementState * > | adjoints_ |
| List of finite element adjoint states associated with this physics module. | |
| std::vector< const serac::FiniteElementDual * > | duals_ |
| List of finite element duals associated with this physics module. | |
| std::vector< ParameterInfo > | parameters_ |
| A vector of the parameters associated with this physics module. | |
| FiniteElementState & | shape_displacement_ |
| The parameter info associated with the shape displacement field. More... | |
| std::unique_ptr< FiniteElementDual > | shape_displacement_sensitivity_ |
| Sensitivity with respect to the shape displacement field. More... | |
| std::unordered_map< std::string, std::vector< serac::FiniteElementState > > | checkpoint_states_ |
| A map containing optionally in-memory checkpointed primal states for transient adjoint solvers. | |
| std::unordered_map< std::string, serac::FiniteElementState > | cached_checkpoint_states_ |
| A container relating a checkpointed cycle and the associated finite element state fields. More... | |
| std::optional< int > | cached_checkpoint_cycle_ |
| An optional int for disk-based checkpointing containing the cycle number of the last retrieved checkpoint. | |
| bool | is_quasistatic_ = true |
| Whether the simulation is time-independent. | |
| double | time_ |
| Current time for the forward pass. | |
| double | max_time_ |
| The maximum time reached for the forward solver. | |
| double | min_time_ |
| The time the forward solver was initialized to. | |
| std::vector< double > | timesteps_ |
| A vector of the timestep sizes (i.e. \(\Delta t\)) taken by the forward solver. | |
| int | cycle_ |
| Current cycle (forward pass time iteration count) | |
| int | max_cycle_ |
| The maximum cycle (forward pass iteration count) reached by the forward solver. | |
| int | min_cycle_ |
| The cycle the forward solver was initialized to. | |
| double | ode_time_point_ |
| The value of time at which the ODE solver wants to evaluate the residual. | |
| int | mpi_rank_ |
| MPI rank. | |
| int | mpi_size_ |
| MPI size. | |
| std::unique_ptr< mfem::ParaViewDataCollection > | paraview_dc_ |
| DataCollection pointer for optional paraview output. | |
| std::unordered_map< std::string, std::unique_ptr< mfem::ParGridFunction > > | paraview_dual_grid_functions_ |
| A optional map of the dual names and duals in grid function form for paraview output. | |
| std::unique_ptr< mfem::ParGridFunction > | shape_sensitivity_grid_function_ |
| A optional view of the shape sensitivity in grid function form for paraview output. | |
| BoundaryConditionManager | bcs_ |
| Boundary condition manager instance. | |
| bool | checkpoint_to_disk_ |
| A flag denoting whether to save the state to disk or memory as needed for dynamic adjoint solves. | |
Additional Inherited Members | |
| Public Types inherited from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > > | |
| template<typename T > | |
| using | qdata_type = std::shared_ptr< QuadratureData< T > > |
| a container holding quadrature point data of the specified type More... | |
| Static Public Attributes inherited from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > > | |
| static constexpr auto | NUM_STATE_VARS = 2 |
| The total number of non-parameter state variables (displacement, acceleration) passed to the FEM integrators. | |
| Protected Types inherited from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > > | |
| using | trial = H1< order, dim > |
| The compile-time finite element trial space for displacement and velocity (H1 of order p) | |
| using | test = H1< order, dim > |
| The compile-time finite element test space for displacement and velocity (H1 of order p) | |
| using | shape_trial = H1< SHAPE_ORDER, dim > |
| Static Protected Attributes inherited from serac::BasePhysics | |
| static constexpr int | FLOAT_PRECISION_ = 8 |
| Number of significant figures to output for floating-point. | |
Detailed Description
template<int order, int dim, typename... parameter_space, int... parameter_indices>
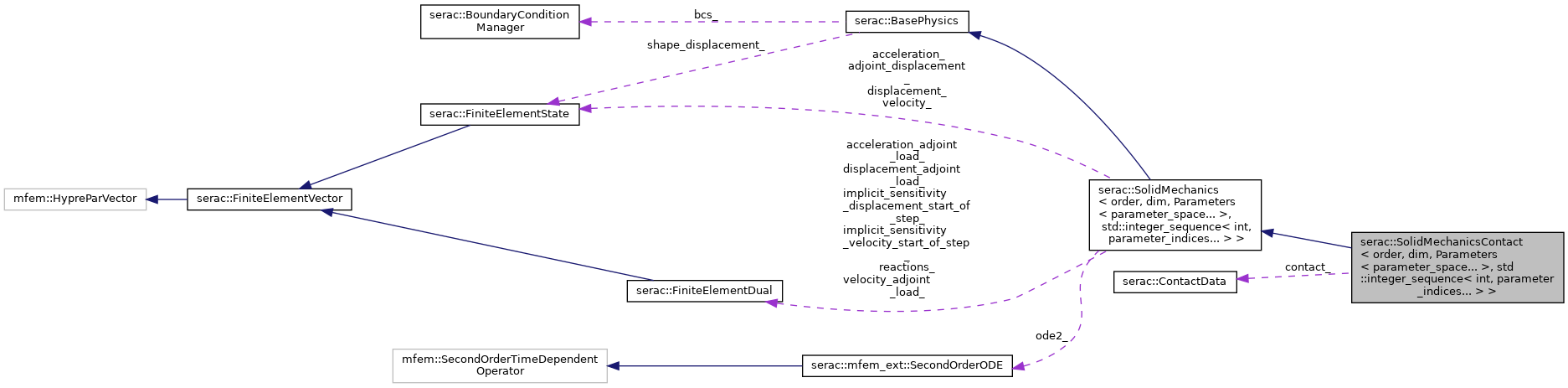
class serac::SolidMechanicsContact< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > >
The nonlinear solid with contact solver class.
The nonlinear total Lagrangian quasi-static with contact solver object. This uses Functional to compute the tangent stiffness matrices.
- Template Parameters
-
order The order of the discretization of the displacement field dim The spatial dimension of the mesh
Definition at line 34 of file solid_mechanics_contact.hpp.
Constructor & Destructor Documentation
◆ SolidMechanicsContact() [1/3]
|
inline |
Construct a new SolidMechanicsContact object.
- Parameters
-
nonlinear_opts The nonlinear solver options for solving the nonlinear residual equations lin_opts The linear solver options for solving the linearized Jacobian equations timestepping_opts The timestepping options for the solid mechanics time evolution operator geom_nonlin Flag to include geometric nonlinearities physics_name A name for the physics module instance mesh_tag The tag for the mesh in the StateManager to construct the physics module on parameter_names A vector of the names of the requested parameter fields cycle The simulation cycle (i.e. timestep iteration) to intialize the physics module to time The simulation time to initialize the physics module to
Definition at line 55 of file solid_mechanics_contact.hpp.
◆ SolidMechanicsContact() [2/3]
|
inline |
Construct a new SolidMechanicsContact object.
- Parameters
-
solver The nonlinear equation solver for the implicit solid mechanics equations timestepping_opts The timestepping options for the solid mechanics time evolution operator geom_nonlin Flag to include geometric nonlinearities physics_name A name for the physics module instance mesh_tag The tag for the mesh in the StateManager to construct the physics module on parameter_names A vector of the names of the requested parameter fields cycle The simulation cycle (i.e. timestep iteration) to intialize the physics module to time The simulation time to initialize the physics module to
Definition at line 77 of file solid_mechanics_contact.hpp.
◆ SolidMechanicsContact() [3/3]
|
inline |
Construct a new Nonlinear SolidMechanicsContact Solver object.
- Parameters
-
[in] input_options The solver information parsed from the input file [in] physics_name A name for the physics module instance [in] mesh_tag The tag for the mesh in the StateManager to construct the physics module on [in] cycle The simulation cycle (i.e. timestep iteration) to intialize the physics module to [in] time The simulation time to initialize the physics module to
Definition at line 96 of file solid_mechanics_contact.hpp.
Member Function Documentation
◆ addContactInteraction()
|
inline |
Add a mortar contact boundary condition.
- Parameters
-
interaction_id Unique identifier for the ContactInteraction bdry_attr_surf1 MFEM boundary attributes for the first surface bdry_attr_surf2 MFEM boundary attributes for the second surface contact_opts Defines contact method, enforcement, type, and penalty
Definition at line 190 of file solid_mechanics_contact.hpp.
◆ completeSetup()
|
inlineoverridevirtual |
Complete the initialization and allocation of the data structures.
- Note
- This must be called before AdvanceTimestep().
Reimplemented from serac::SolidMechanics< order, dim, Parameters< parameter_space... >, std::integer_sequence< int, parameter_indices... > >.
Definition at line 203 of file solid_mechanics_contact.hpp.
Member Data Documentation
◆ d_residual_d_
|
protected |
Array functions computing the derivative of the residual with respect to each given parameter.
- Note
- This is needed so the user can ask for a specific sensitivity at runtime as opposed to it being a template parameter.
Definition at line 1567 of file solid_mechanics.hpp.
◆ J_constraint_e_
|
protected |
rows and columns of J_constraint_ that have been separated out because are associated with essential boundary conditions
Definition at line 288 of file solid_mechanics_contact.hpp.
◆ J_e_
|
protected |
rows and columns of J_ that have been separated out because are associated with essential boundary conditions
Definition at line 1529 of file solid_mechanics.hpp.
◆ shape_displacement_
|
protected |
The parameter info associated with the shape displacement field.
- Note
- This is owned by the State Manager since it is associated with the mesh
Definition at line 488 of file base_physics.hpp.
The documentation for this class was generated from the following file:
- src/serac/physics/solid_mechanics_contact.hpp